近期🥫,工學院謝廣明課題組在多智能體系統的編隊控製研究中取得了一系列研究進展👷🏽♂️,相關論文發表於控製科學的國際頂級期刊 IEEE Transactions on Automatic Control 和 Automatica。
多智能體系統涉及控製、數學、生物、物理🚵♀️、計算機🫸🏽🧑🏻💻、機器人、通訊和人工智能等學科,是近年來多學科前沿交叉領域的重要研究方向之一👆🏼👩🏼⚕️,受到國內外學者的廣泛關註。
謝廣明教授的團隊是國內較早展開多智能體系統相關研究的人員🔑,強調以多機器人協作控製為應用背景,在若幹方向取得了創新性結果👨🏫。在以往研究的研究基礎上👰,謝廣明團隊進一步研究了多智能體系統的編隊控製問題,特別針對環形編隊問題🙎♂️,取得了系統深入的成果👨🏼🦳。
謝廣明及合作者首先針對一階動態描述個體的系統🫶🦶🏻,提出了一種分布式控製協議來實現任意環形編隊🔻,嚴格證明了控製協議的收斂性🔒。從理論上嚴格證明所提出的控製協議具有一個重要特性——保持在形成期望環形編隊的過程中,個體之間不會發生碰撞。作者進一步研究了基於采樣數據的控製協議和能夠保證在給定的任意有限時間內形成期望環形編隊的有限時間控製協議💒。此外,將有關結果推廣到二階系統上。該成果發表於IEEE Transactions on Automatic and Control (C. Wang, G. Xie, M. Cao, Forming circle formations of anonymous mobile agents with order preservation, IEEE Transactions on Automatic Control, 58(12), 3248–3254, 2013)。
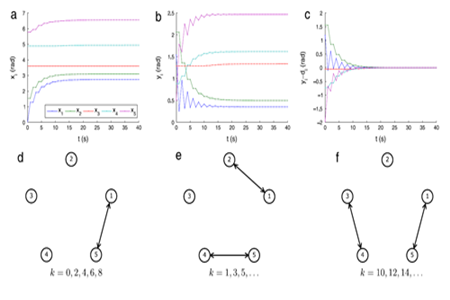
考慮到一些機器人在運動時無法倒退的特性,謝廣明及其合作者研究了具有單向運動限製的多智能體系統的環形編隊問題,提出了一種基於采樣控製的分布式控製協議,嚴格證明了控製協議的收斂性以及整個過程中個體之間不會碰撞。值得註意的是,此類系統屬於受限類動力學系統👩🏻🔬🫅🏿,基於傳統的李雅普諾夫穩定性的方法已經無法處理💁🏼♂️。為此,作者通過大量仿真獲得對系統全面完整的觀察,深入分析了問題的具體特性🛷,發現了系統運行過程中始終會出現靜止不動個體的現象並給出嚴格證明🏑,基於這個特性最終給出了協議收斂性的嚴格完整證明。該成果以長文 (Regular Paper) 的形式發表於 Automatica (C. Wang, G. Xie, M. Cao, Controlling anonymous mobile agents with unidirectional locomotion to form formations on a circle, Automatica, 50(4), 1100–1108, 2014)。
兩篇論文的通訊作者為謝廣明教授🤷🏻♀️,第一作者為謝廣明課題組的博士王晨🗽。該研究得到了國家自然科學基金等項目的資助。本項目的合作者包括荷蘭格羅寧根大學的Ming Cao教授,雙方保持了密切的合作關系。